
Last modified on September 19, 2024
Emergency Localization for Connected and Automated Vehicles
The potential benefits of Cooperative, connected, and automated mobility (CCAM) are immense, from fewer accidents to smoother commutes and lower emissions, as vehicles communicate seamlessly with each other and their surroundings, making split-second decisions to optimize travel efficiency and safety.
However, whether through a sensor malfunction, communication breakdown or a cyberattack, the possibility of system failures cannot be ignored.
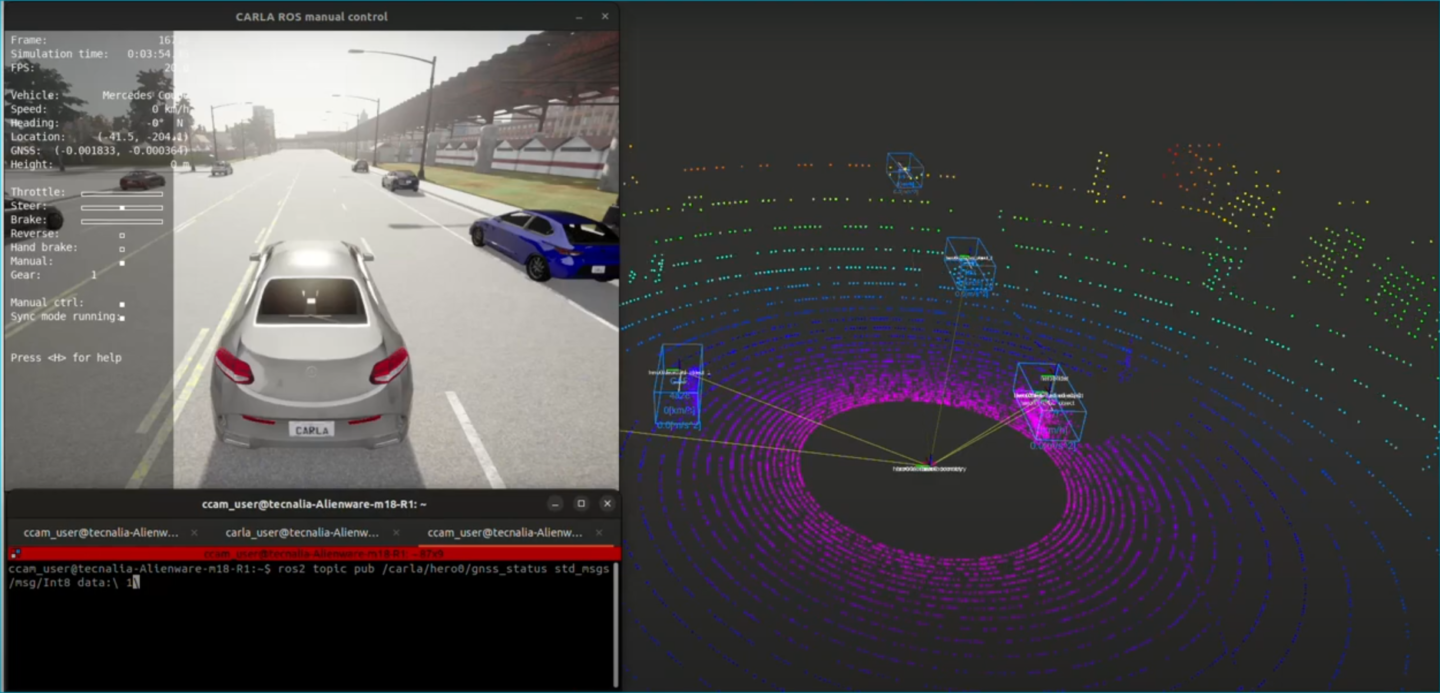
Localization is crucial for Connected and Automated Vehicles (CAVs) safe navigation, precise manoeuvering, and effective decision-making. For accurate localization, CAVs rely on a combination of sensors, including LiDAR, GNSS, and cameras. In a situation where, for example, the CAV is driving in a map-less zone with poor visibility conditions for cameras, relying only on GNSS for localization, if the GNSS fails or reduces its accuracy, safety of the vehicle cannot be jeopardized. This is where fallback strategies come into play.
The SELFY project Cooperative Resilience and Healing System (CRHS) team is working on a fallback localization algorithm that uses the detection of road objects (landmarks), such as other vehicles, to localize the vehicle using relative measurements. If the position of at least one object is known before the GNSS failure, the continued detection of that object (or new objects before losing the visibility of the previous ones) help localize the CAV new position and continue the operation until a safe stop manoeuver can be executed (see it in action in this video).
More information (source article)